Estimateur neuronal pour l'algorithme A*
Application au problème du voyageur de commerce
Ce stage de DEA a eu pour cadre théorique les principes d'optimisation par parcours de graphes.
Il a abouti à la mise au point d'un estimateur neuronal pour un algorithme d'optimisation par recherche combinatoire, en l'occurrence l'algorithme A*. Cet estimateur a pour but de s'affranchir de la recherche de l'heuristique, habituellement de forme mathématique, grâce à un réseau de neurones.
Il a été testé sur le problème générique du voyageur de commerce avec des résultats probants.
Publication associée à ce travail
- G. Roussel, E. Ternisien, S. Maouche, "Combinatorial optimizing algorithm using tree search A* and neural network estimation", CESA'96 IMACS Multiconference, Computational Engineering in System Applications, Juillet 1996, Lille, France.
Caractérisation aveugle d'un modèle de dispersion en représentation d'état et localisation de source
Directeur : Pr. Mohammed BENJELLOUN
Co-directeur : Gilles ROUSSEL
L'axe de recherche développé au cours de cette thèse concerne la localisation de source et l'identification de paramètres physiques dans le cadre des modèles dispersifs. Plus principalement, l'intérêt se porte sur la surveillance de la pollution atmosphérique qui regroupe l'identification des paramètres du modèle et la localisation de source fixe à l'origine du phénomène de diffusion. Les techniques employées pour résoudre ce problème tranchent avec celles couramment utilisées par les physiciens puisqu'il s'agit de techniques basées sur le traitement de signal.
La contribution de cette thèse peut se résumer par la définition d'une méthodologie permettant de passer du modèle physique à un modèle d'état, par une réduction du nombre de paramètres recherchés par les techniques d'identification aveugles, et par la mise en œuvre d'un algorithme d'estimation/décision pour la localisation basé sur des critères de décision temporels et fréquentiels.
Introduction
Dans la physique classique, les modèles dispersifs sont une classe de modèles traduisant sous forme mathématique une grande partie des phénomènes naturels. L'utilisation habituelle de ceux-ci passe par une exploitation de leur forme continue ou par une discrétisation dans l'espace et dans le temps. De la même façon, ces modèles sont souvent employés dans le sens direct de la propagation, c'est-à-dire de la (des) source(s) vers le (les) capteur(s). En effet, leur inversion mène à un type de problèmes appelé problèmes inverses dont l'inconvénient majeur est qu'ils sont, dans la grande majorité des cas, mal posés. Bien que de nombreux travaux aient traité ce sujet, il est toujours délicat d'aborder l'inversion d'un système en partant du capteur vers la source.
Le travail se situe dans cette problématique, et propose, à travers cette thèse et les publications qui lui sont associées, une méthode d'inversion généralisable à la classe des modèles dispersifs, qui permet l'identification de paramètres inconnus ou difficilement mesurables, et la localisation de la source à l'origine de l'apport de matière dispersée. L'étude menée s'appuie sur une application au centre des préoccupations d'aujourd'hui, qui est la surveillance de la pollution atmosphérique. Ce phénomène de propagation est très proche (dans des cas topographiques simples) du modèle de transport-diffusion (ou de conservation de masse) classique en mécanique des fluides. Cette équation a permis la validation de la méthode proposée dans le cas des modèles invariants (à paramètres constants).
L'étude s'est déroulée en plusieurs étapes présentant une cohérence temporelle par rapport au problème traité.
Modélisation du problème direct
La première étape est la mise au point d'une méthodologie permettant de passer du modèle physique sous sa forme mathématique (EDP) à une formulation d'état. C'est dans l'aboutissement à cette formulation d'état que se situe la principale originalité de ce travail. En effet, habituellement, l'équation discrétisée est utilisée sous sa forme classique, ou tout au plus, une représentation matricielle en est donnée. Ici, la représentation d'état fournit une modélisation particulière de l'équation discrétisée, et permet un découplage du terme d'évolution (propagation), de la commande (image de la source), et du système d'observation représentant le réseau de capteurs. De plus, cette dernière présente également l'avantage de favoriser l'utilisation de techniques existant en théorie des systèmes.
Cette formulation permet d'effectuer les simulations suivantes qui servent de base pour les étapes d'identification et de localisation
 |
 |
| Propagation du panache vue du dessus | Propagation du panache en 3D |
 |
 |
| Evolution des signaux temporels | Evolution des courbes iso-concentrations |
Identification des paramètres inconnus du modèle de dispersion
Cette étape consiste à identifier de façon aveugle les paramètres manquants à la connaissance parfaite du modèle direct, dans le cas d'une source localisée. Cette identification est possible grâce aux méthodes aveugles (ne prenant en compte que les observations fournies par les capteurs), et notamment la méthode sous-espace qui est généralement utilisée en télécommunication. L'amélioration apportée à cette méthode se traduit par l'intégration d'une information a priori qui est la connaissance de la forme du modèle de comportement (de par la formulation d'état). Cette information a priori permet une réduction significative de l'espace de recherche des paramètres.
Un exemple de reconstruction des réponses impulsionnelles correspondantes aux canaux de propagation existants entre la source et les différents capteurs est donné ci dessous
Localisation de la source
La dernière étape se réduit alors la localisation de la source
à l'origine de l'émission de
polluant. Cette étape se réalise par un algorithme
d'estimation/décision visant à minimiser des critères de décision en
vue de retrouver la véritable position de la source. Plusieurs critères
de décision ont été développés et ont fait l'objet de publications.
Estimation de la source
Une fois le système de dispersion identifié et la source localisée, une méthode de déconvolution à base de commande optimale permet alors d'atteindre l'objectif final d'estimation du signal source.
Une fois le signal source estimée, on peut alors atteindre le but final de cette étude qui est la reconstruction a posteriori de la carte des concentrations sur la zone d'intérêt.
Conclusion
Pour résumer, les originalités du travail par rapport à la communauté sont :
- le type de problème abordé;
- la modélisation d'état des phénomènes physiques;
- l'utilisation de techniques du traitement du signal hors du contexte habituel;
- l'algorithme d'estimation/décision pour la localisation de source de pollution.
Publications associées à ce travail
- E. Ternisien, "Estimation d'un système de dispersion et localisation de source : Application à la surveillance de la pollution", Editions Universitaires Européennes, ISBN : 978-6131540073.
- E. Ternisien, G. Roussel, "Identification et déconvolution d'un modèle de dispersion de pollution dans un cadre multi-sources", e-sta, 2005, vol. 2. (pdf)
- E. Ternisien, G. Roussel, "Identification d'un modèle de dispersion et estimation des émissions de pollution dans un cadre multi-sources", Conférence Internationale Francophone d'Automatique (CIFA), 22-24 novembre 2004, Douz, Tunisie.
- G. Roussel, E. Ternisien, M. Benjelloun, "Critère de dissemblance de spectres partiels de source pour la localisation. Application à la surveillance de la pollution", Traitement du signal, 2002, vol. 19, pages 37-48. (pdf)
- G. Roussel, G. Delmaire, E. Ternisien, R. Lherbier, "Separation problem of industrial particles emissions using a stationary scattering model", Environment Modelling and Software, 2000, vol. 15, pages 653-661. (pdf)
- E. Ternisien, G. Roussel, M. Benjelloun, "Subspace method for blind characterization of atmospheric scattering model", IMACS 2000, 21-25 août 2000, Lausanne SUISSE. (pdf)
- E. Ternisien, G. Roussel, M. Benjelloun, "Critère de Localisation de Source et d'Identification pour un modèle de dispersion SIMO", Conférence Internationale Francophone d'Automatique (CIFA), 5-8 juillet 2000, Lille, France. (pdf)
- E. Ternisien, G. Roussel, M. Benjelloun, "Blind localization by subspace method for a scattering model", SYSID 2000 IFAC, 21-23 juin 2000, Santa Barbara, USA. (pdf)
- E. Ternisien, G. Roussel, M. Benjelloun, "Identification aveugle du milieu de dispersion et localisation de source de pollution par observations multicapteur", Journées Automatique et environnement, CRAN, 9-10 mars 2000, Nancy, France. (pdf)
Détection de défauts dans les moteurs asynchrones
Introduction
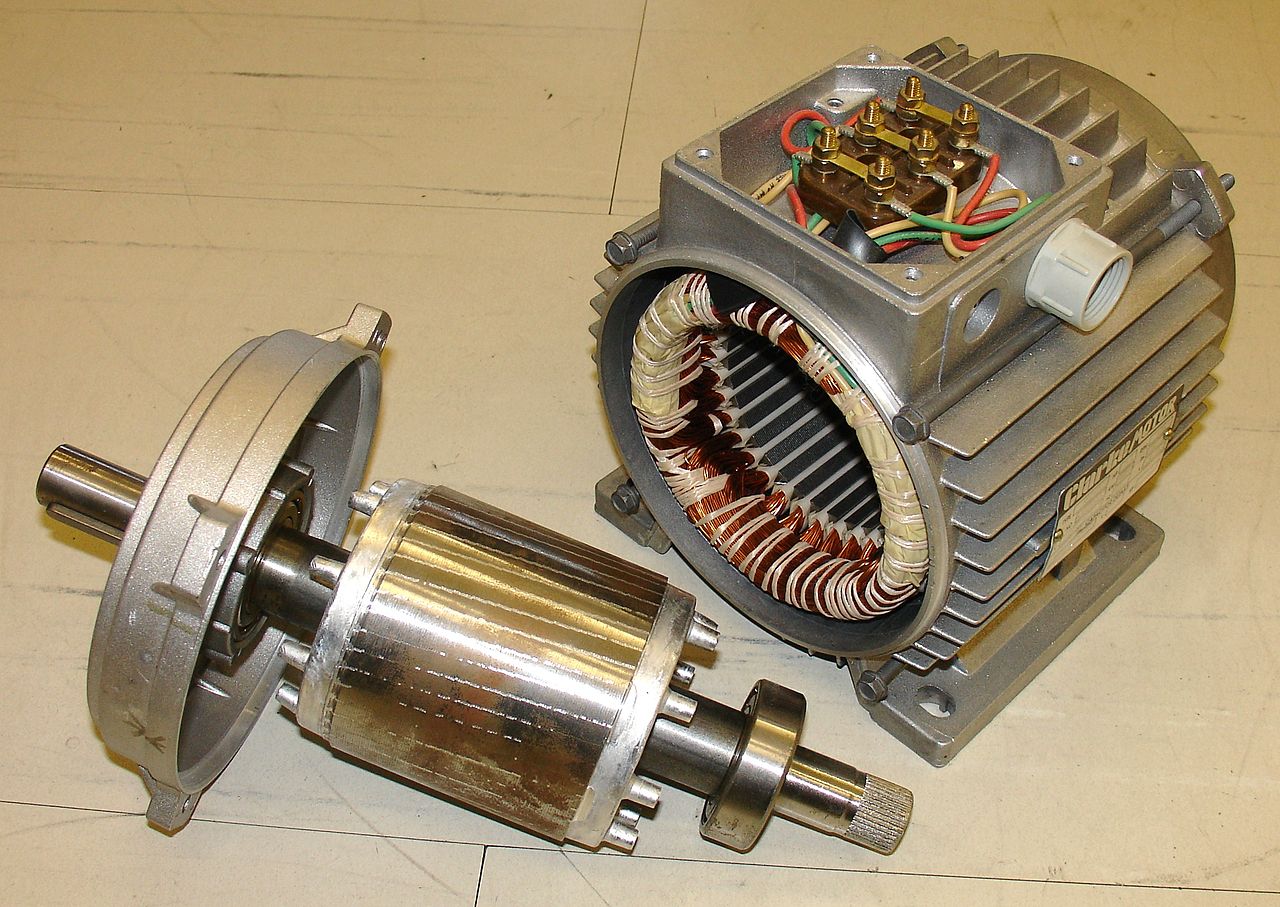
La machine asynchrone, est une machine électrique à courant alternatif sans connexion entre le stator et le rotor. Elle est très utilisée dans le domaine de la conversion d'énergie car elle possède un excellent rapport qualité/prix. On la retrouve dans de nombreuses applications, essentiellement dans l'industrie et les transports.
Du fait de leur forte présence dans l'industrie, un défaut sur ces machines peut rapidement engendrer un arrêt et une perte financière importante. Un intérêt scientifique certain est donc porté à la détection préventive de défauts sur ce type de moteur. Les principaux défauts peuvent être mécaniques (roulements, flasque, arbre, défaut d'excentricité), ou électriques au niveau du stator comme du rotor (court-circuit statorique, rupture de barre rotorique, rupture de portion d’anneaux de court-circuit).
|
|
| Moteur asynchrone | Rotor à cage d'écureuil |
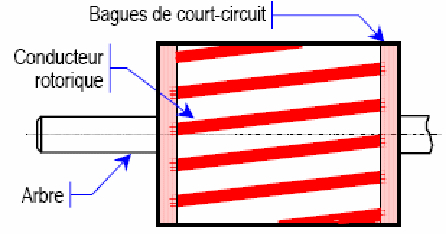
Ce travail s'inscrit dans le cadre de la détection de défauts électriques pour les moteurs asynchrones à rotor à cage d'écureuil. Le rotor à cage d'écureuil se compose de barres reliées entre elles par des anneaux de court-circuit. Les défauts se traduisent souvent par une rupture de la liaison entre une barre et l'anneau de court-circuit. Ces ruptures peuvent être dues à des vibrations excessives de la machine ou à des courants trop élevés circulant dans les barres (charge trop importante ou démarrage trop fréquents).
La détection de ce type de de défaillance doit pouvoir se faire très rapidement et avec des méthodes dites "non intrusives". A ce jour, la majorité des méthodes permettant la détection de ces défauts se basent soit sur une analyse vibratoire de la machine, soit sur une analyse harmonique du courant absorbé (courant statorique). Le travail réalisé, fruit de la collaboration entre le GREEN et le CRAN a permis de développer deux nouvelles méthodes basées sur l'analyse harmonique du courant statorique.
Différences entre une machine avec un rotor sain et une machine avec un rotor défaillant
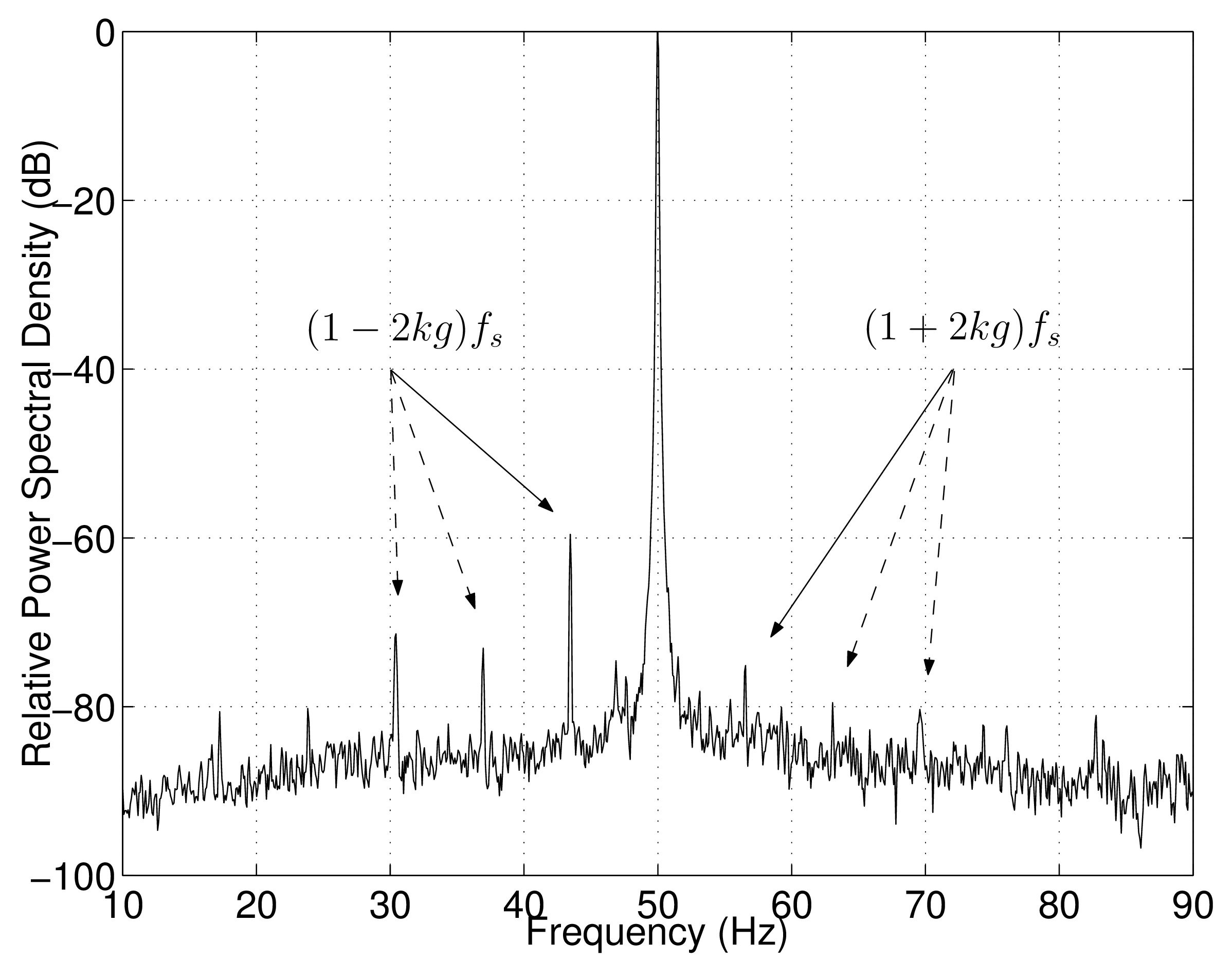
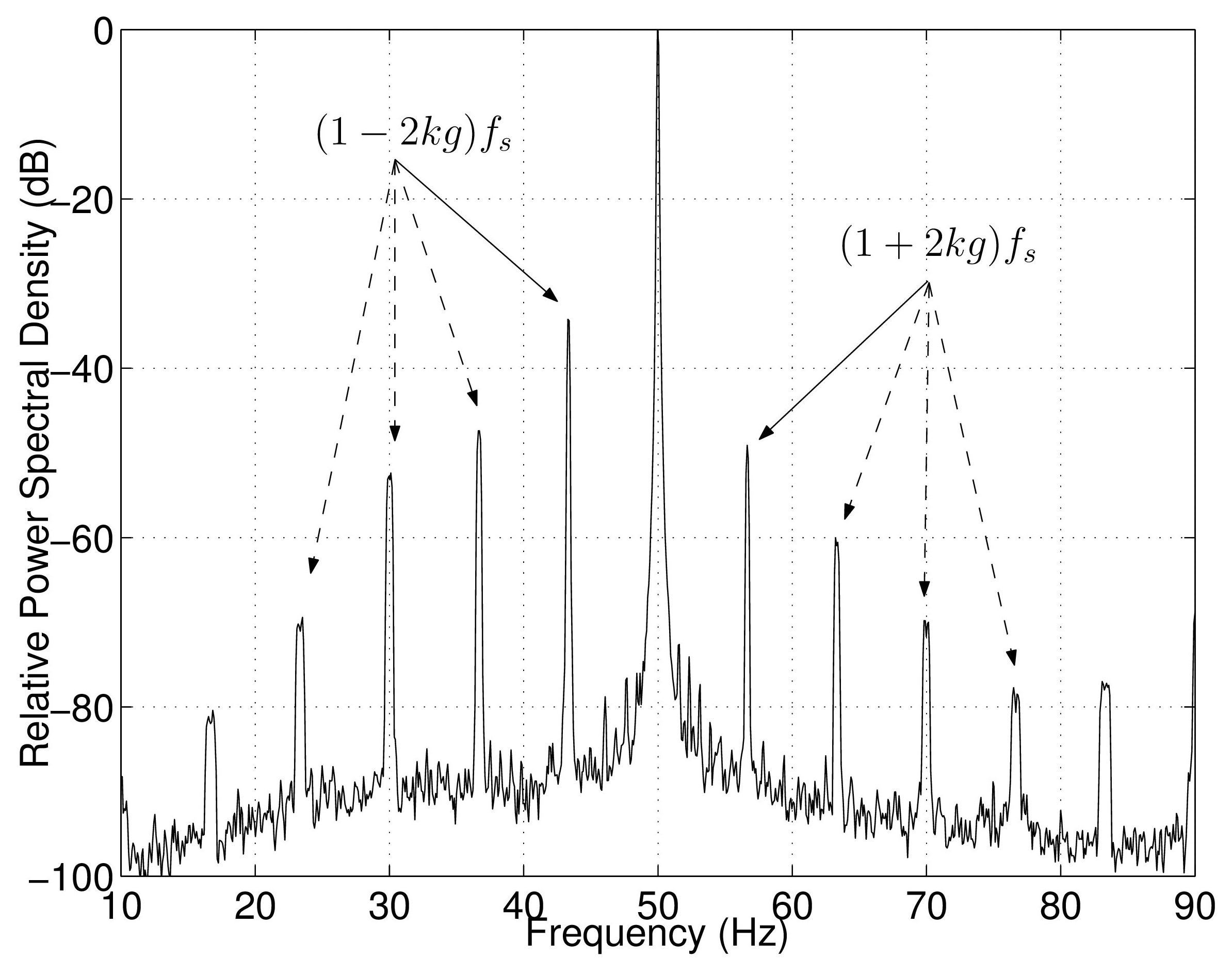
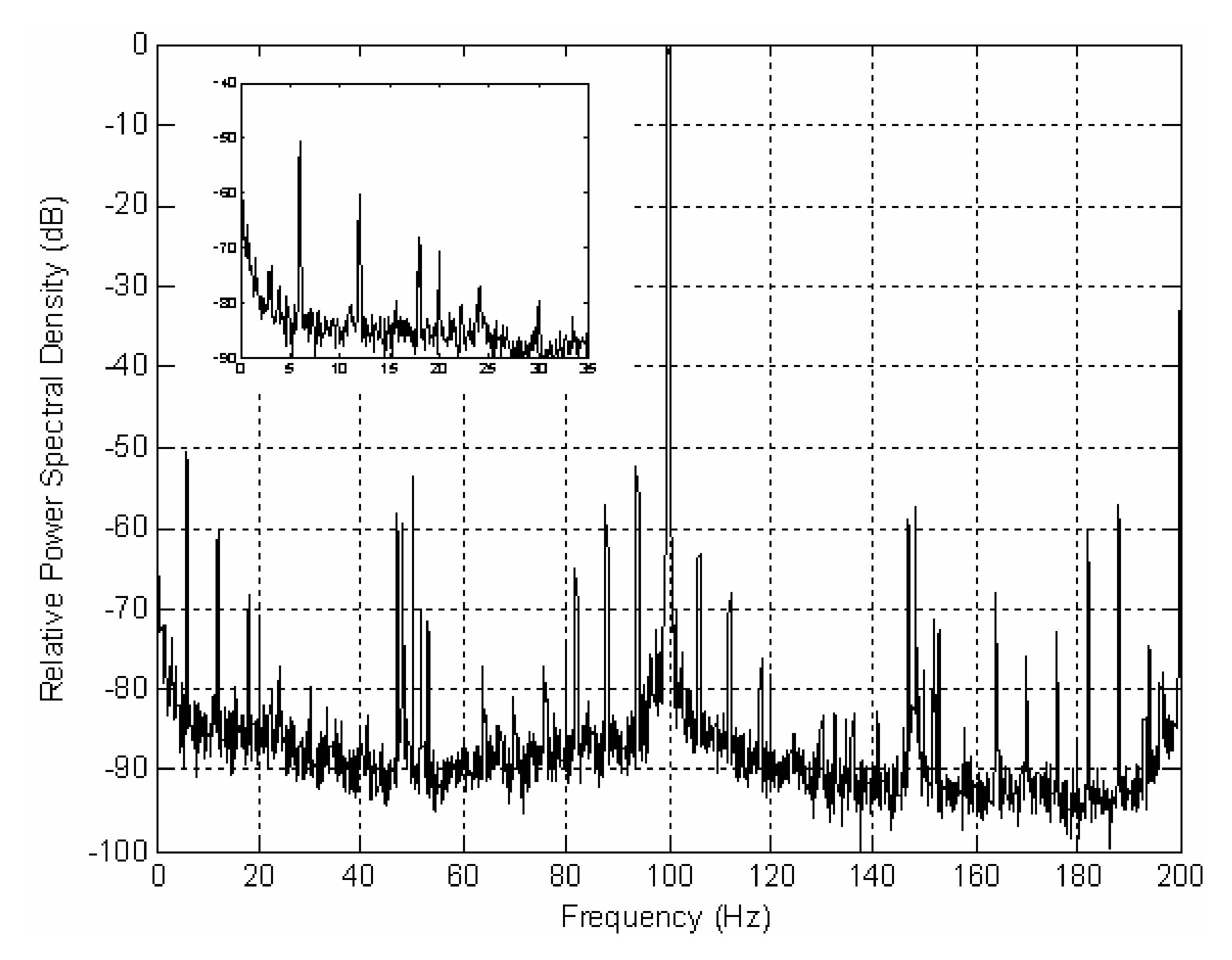
Une analyse spectrale simple d'un courant statorique permet de connaître rapidement l'état de la cage rotorique par comparaison avec son spectre obtenu en fonctionnement sain. En effet, l'apparition d'un défaut engendre l'apparition ou l'augmentation en amplitude de certaines fréquences spécifiques dépendantes du glissement de la machine.
Ces fréquences se calculent grâce à la formule suivante :
où est le glissement de la machine, la fréquence de synchronisme (50 Hz) et .
|
|
| Module du spectre du courant statorique pour un rotor sain | Module du spectre du courant statorique pour un rotor avec une barre cassée |
Méthode n°1 : Calcul d'indices de défaillances
Comme exposé précédemment, les fréquences de défaut sont dépendantes du glissement de la machine asynchrone. On remarque également que les signaux correspondants à ces fréquences sont une modulation en amplitude du signal fondamental 50 Hz. On peut alors calculer des indices de modulation et ainsi surveiller leur évolution au cours du temps par des méthodes de traitement du signal qui, à ce jour, ont fait leur preuves (FFT glissante par exemple). Ensuite, via des seuils déterminés à partir de l’étude de la machine saine, une détection de défauts est mise en place.
L'une des difficultés majeures est la détermination automatique du glissement de la machine qui va varier en fonction de la charge. Pour déterminer le glissement, il faut réussir à discriminer le premier pic à gauche du fondamental, ce qui n'est pas aisé si la charge est faible ou si le moteur fonctionne à vide (glissement faible).
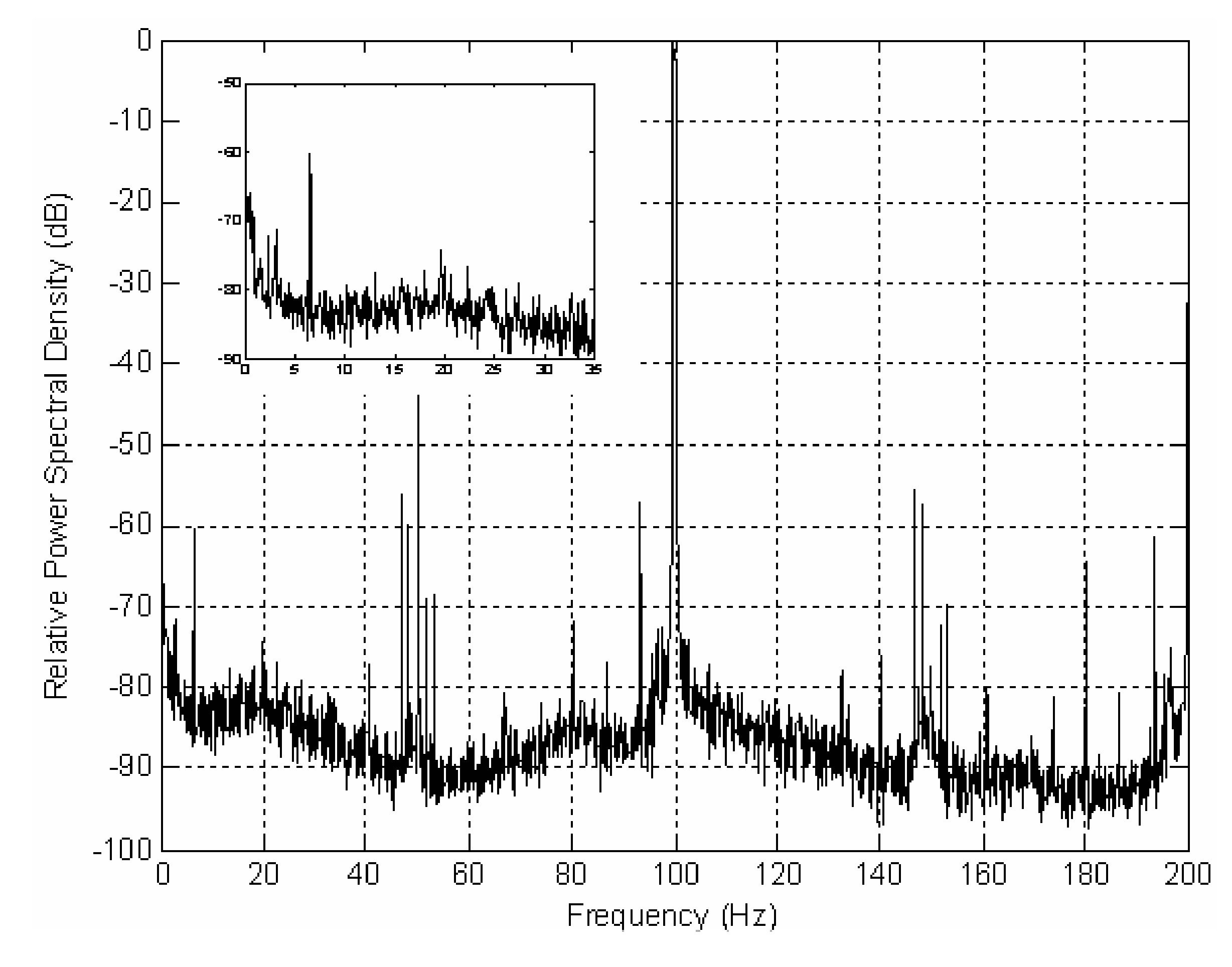
Ainsi, la méthode utilisée exploite également la puissance instantanée, qui apporte de l'information supplémentaire sous forme d'indices de modulation complémentaires, mais également des signaux de basses fréquences dépendants eux aussi du glissement et plus facilement détectables dans le bruit de fond.
Une étude sur les autres fréquences (harmoniques de rang 3,5,7,9) a également été menée sur le même principe et complète la liste des indices possibles à surveiller pour la détection de défauts.
|
|
| Module du spectre de la puissance absorbée pour un rotor sain | Module du spectre de la puissance absorbée pour un rotor avec une barre cassée |
Résultats :
- En définissant des critères de détection sur les différents indices de modulation calculés, la méthode permet de détecter des défauts naissants (début de barre cassée - 25% de la charge nominale).
- La méthode présente quelques limites pour les défauts naissants (barre non encore cassée) lorsque le moteur est à vide. Le courant circulant dans les barres rotoriques étant trop faible, la variation des indices de modulation n'est pas significative.
- Afin de pouvoir détecter, il faut auparavant faire des essais avec les rotors sains dans le but de disposer d'un signal de référence.
Méthode n°2 : Diagnostic de défaut sans référence
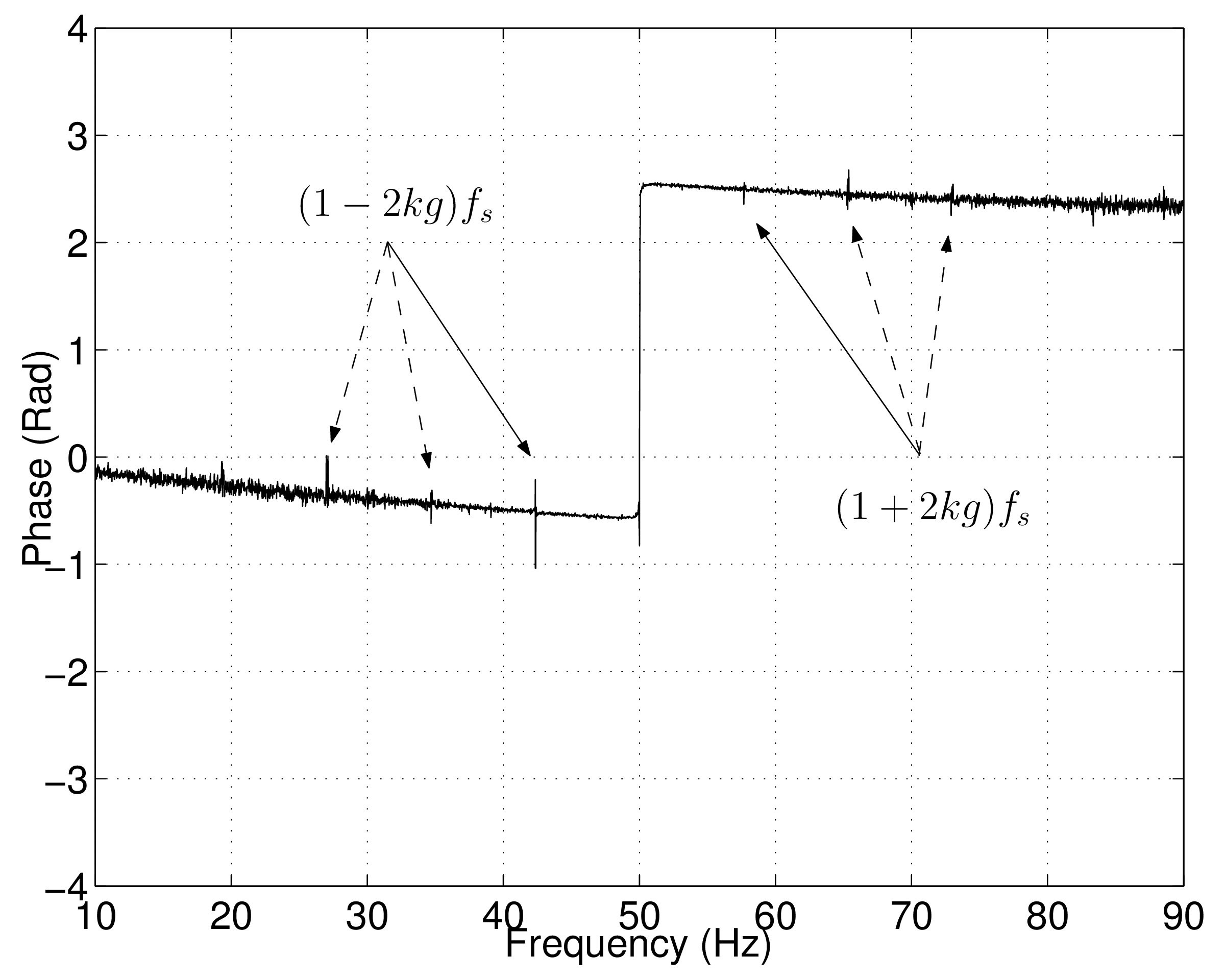
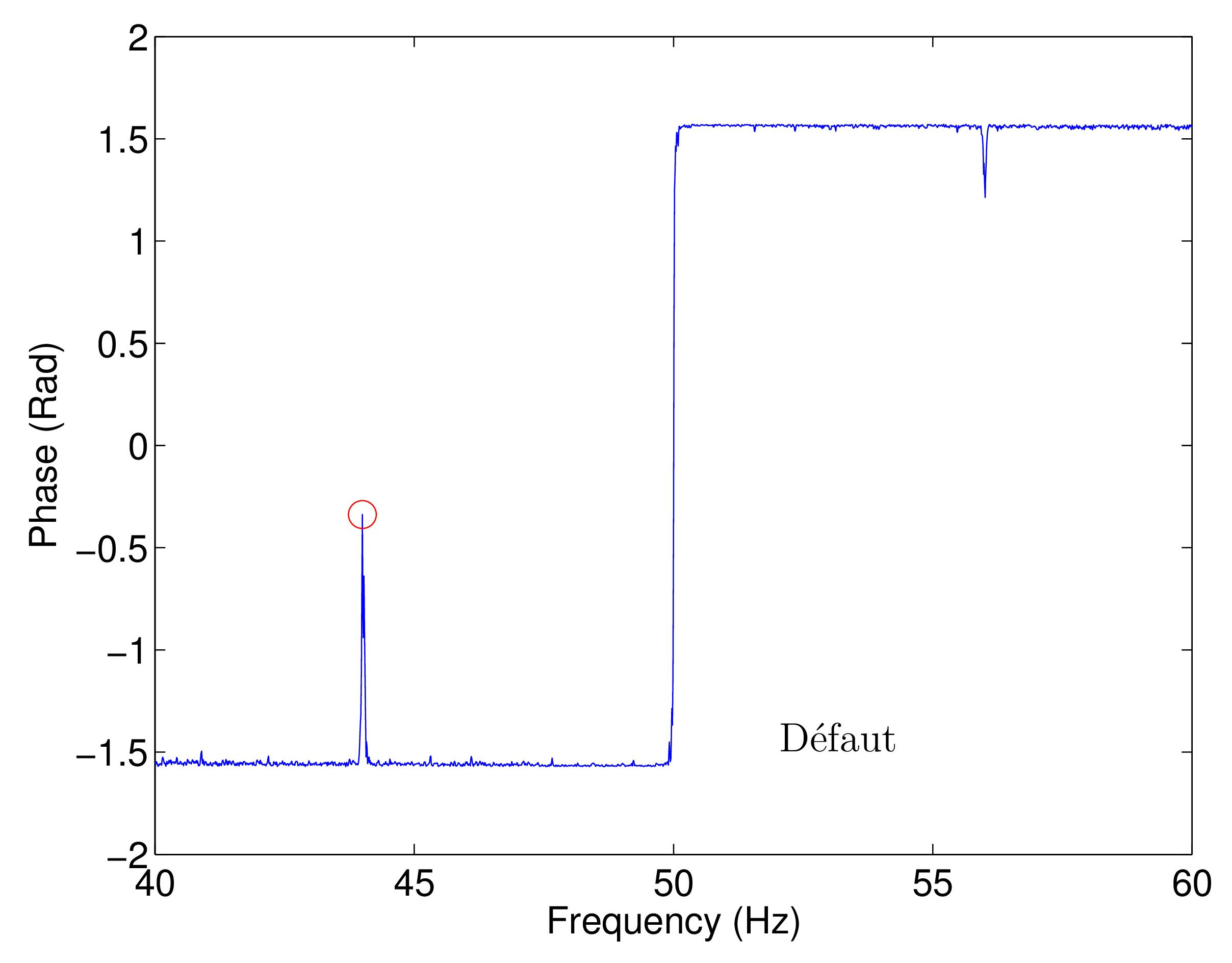
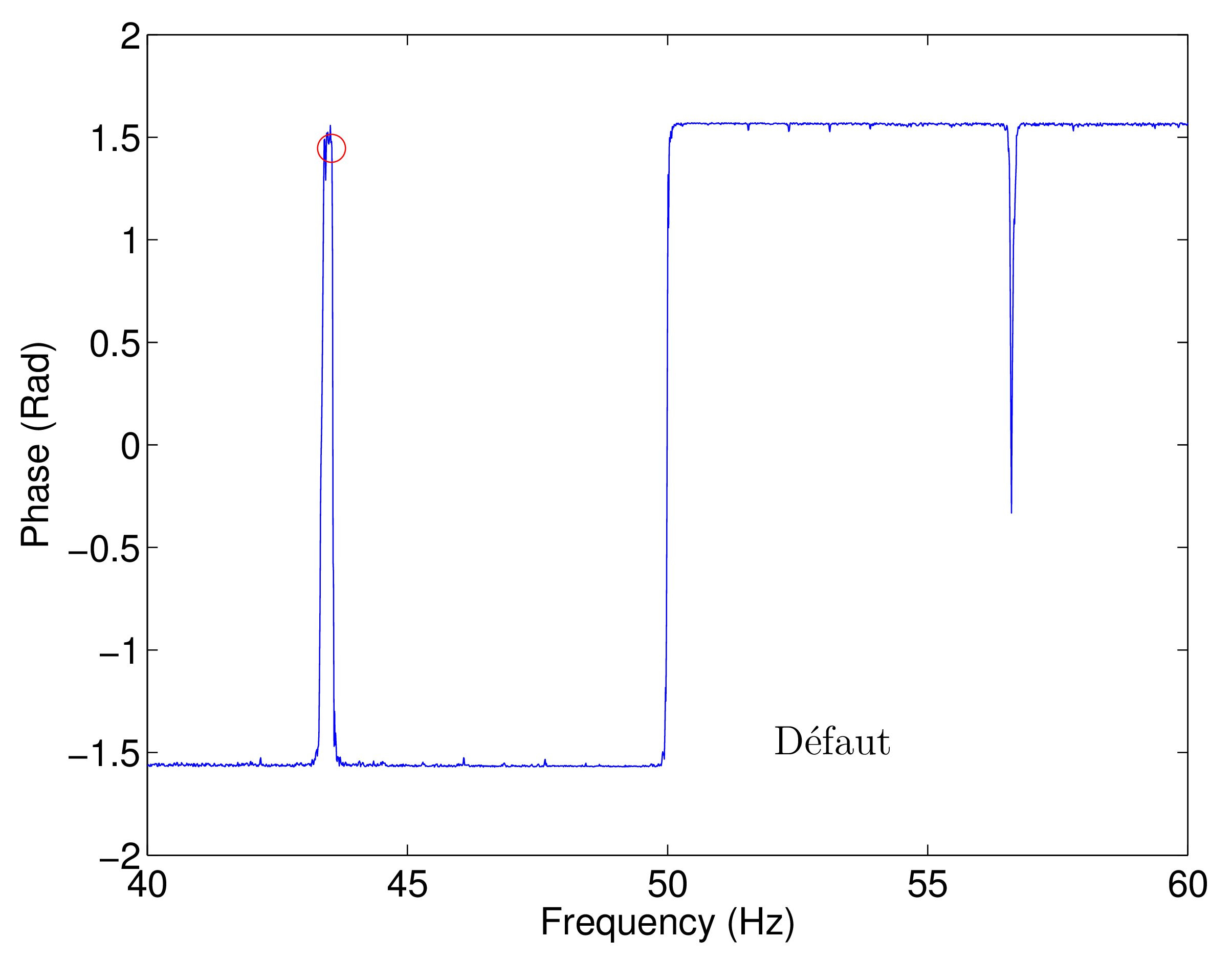
Contrairement aux méthodes classiques, c'est ici la phase du spectre du courant statorique qui est exploitée, ce qui en fait une méthode originale. Cette dernière présente en effet des sauts de phase aux mêmes fréquences dépendantes du glissement que dans le module du spectre du courant statorique.
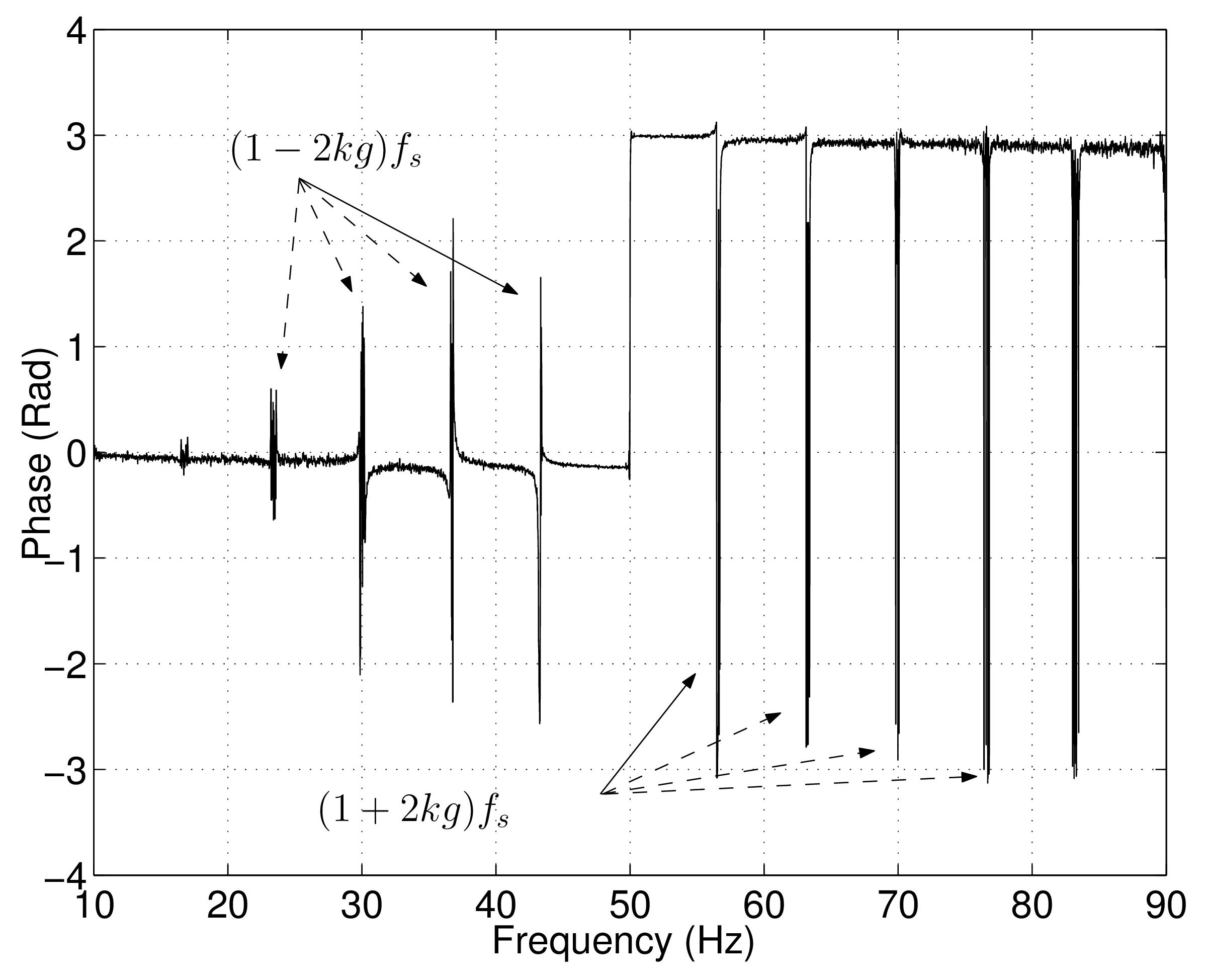
Comme le montre les figures suivantes, les sauts de phase sont assez facilement détectables, ce qui facilite l'estimation du glissement.
|
|
| Phase du spectre du courant statorique pour un rotor sain | Phase du spectre du courant statorique pour un rotor avec une barre cassée |
Le principe de la méthode est le suivant :
- Détermination de la fréquence (et du glissement) correspondant au saut de phase à gauche du 50 Hz.
- Détermination, grâce au glissement, du saut de phase symétrique à droite du 50 Hz.
- Si l'amplitude de ce dernier est significative par rapport au bruit de fond (moyennant le réglage d'un seuil), alors il y a présence de défaut
La détection se fait ici sans référence au rotor sain car la détection de défauts ne se fait pas en observant la variation d'une valeur comme dans la première méthode.
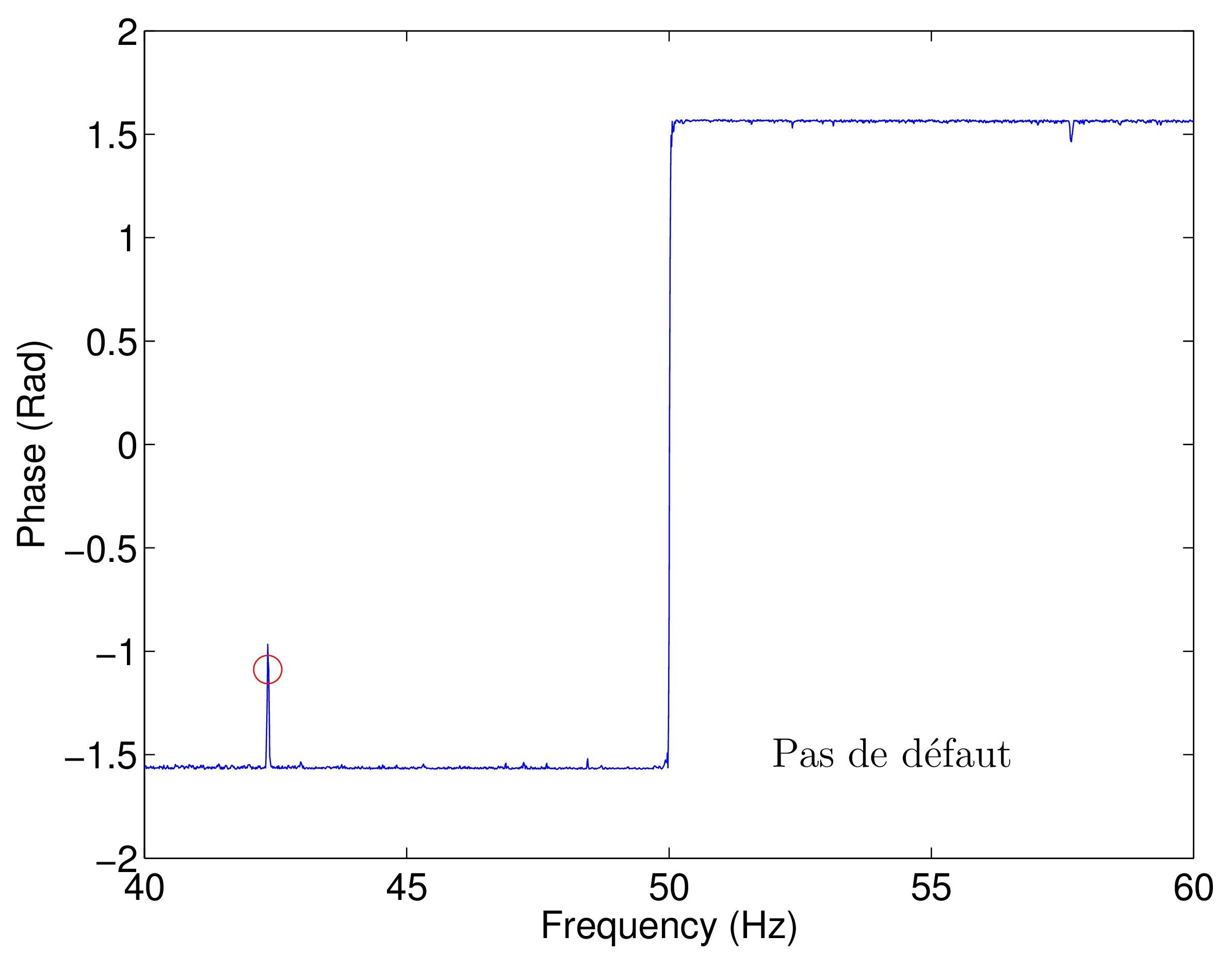
Cette première approche rencontrant des problèmes liés à la résolution spectrale pouvant parfois donner des sauts de phase inattendus, une deuxième approche utilisant la transformée de Hilbert a été développée afin de construire un nouveau signal analytique pour lequel les variations de la partie réelle et imaginaire du module du spectre sont parfaitement maîtrisées.
|
|
|
| Phase du spectre du courant statorique pour un rotor sain | Phase du spectre du courant statorique pour un rotor avec une demie-barre cassée | Phase du spectre du courant statorique pour un rotor avec une barre cassée |
Le signal de phase est alors toujours situé dans l'intervalle Les résultats s'en trouvent fiabilisés, nettement améliorés et les défauts naissants détectés à faible charge.
Résultats :
- La méthode permet de détecter des défauts naissants (début de barre cassée - 25% de la charge nominale).
- La détection se fait sans référence au rotor sain.
Conclusion
L'originalité de ce travail se situe donc dans le développement de 2 méthodes :
- Une méthode basée sur le calcul d'indice de modulation exploitant les transformées de Fourier du courant statorique et de la puissance instantanée absorbés par la machine.
- Une méthode originale exploitant la phase du spectre du courant statorique et la transformée de Hilbert. Cette dernière méthode ne demande pas de signal de référence du rotor sain.
Publications associées à ce travail
- G. Didier, E. Ternisien, O. Caspary, H. Razik, "A new approach to detect broken rotor bars in induction machines by current spectrum analysis", Mechanical Systems and Signal Processing, 2007, vol. 21, pages 1127-1142. (pdf)
- G. Didier, E. Ternisien, O. Caspary, H. Razik, "Fault detection of broken rotor bars in induction motor using a global fault index", IEEE Transactions on Industry Applications, 2006, vol. 42, pages 79-88. (pdf)
- G. Didier, E. Ternisien, H. Razik, "Detection of incipient rotor cage fault and mechanical abnormalities in induction motor using global modulation index on the line current spectrum", Proc. 5th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), 7-9 septembre 2005, Vienne, Autriche. (pdf)
- G. Didier, E. Ternisien, O. Caspary, H. Razik, H. Henao, A. Yazidi, G.-A. Capolino, "Rotor fault detection using the instantaneous power signature", Proc. IEEE International Conference on Industrial Technology (ICIT), 8-10 décembre 2004, Hammamet, Tunisie.
- G. Didier, E. Ternisien, O. Caspary, H. Razik, "Rotor cage fault detection in induction motor using global modulation index on the instantaneous power spectrum", Proc. 4th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), 24-26 août 2003, Atlanta, USA. (pdf)
Livre
E. Ternisien, "Estimation d'un système de dispersion et localisation de source : Application à la surveillance de la pollution", Editions Universitaires Européennes, ISBN : 978-6131540073.
Publications dans des revues internationales avec comité de lecture
- G. Didier, E. Ternisien, O. Caspary, H. Razik, "A new approach to detect broken rotor bars in induction machines by current spectrum analysis", Mechanical Systems and Signal Processing, 2007, vol. 21, pages 1127-1142. (pdf)
- G. Didier, E. Ternisien, O. Caspary, H. Razik, "Fault detection of broken rotor bars in induction motor using a global fault index", IEEE Transactions on Industry Applications, 2006, vol. 42, pages 79-88. (pdf)
- G. Roussel, G. Delmaire, E. Ternisien, R. Lherbier, "Separation problem of industrial particles emissions using a stationary scattering model", Environment Modelling and Software, 2000, vol. 15, pages 653-661. (pdf)
Publications dans des revues nationales avec comité de lecture
- E. Ternisien, G. Roussel, "Identification et déconvolution d'un modèle de dispersion de pollution dans un cadre multi-sources", e-sta, 2005, vol. 2. (pdf)
- G. Roussel, E. Ternisien, M. Benjelloun, "Critère de dissemblance de spectres partiels de source pour la localisation. Application à la surveillance de la pollution", Traitement du signal, 2002, vol. 19, pages 37-48. (pdf)
Publications dans des conférences internationales avec actes et comité de lecture
- L. Koessler, T. Cecchin, E. Ternisien, L. Maillard, "3D handheld laser scanner based approach for automatic identification and localization of EEG sensors", Proc. 32nd International Conference of the IEEE EMBS, 31 août - 4 septembre 2010, Buenos Aires, Argentine. (pdf)
- G. Didier, E. Ternisien, H. Razik, "Detection of incipient rotor cage fault and mechanical abnormalities in induction motor using global modulation index on the line current spectrum", Proc. 5th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), 7-9 septembre 2005, Vienne, Autriche. (pdf)
- G. Didier, E. Ternisien, O. Caspary, H. Razik, H. Henao, A. Yazidi, G.-A. Capolino, "Rotor fault detection using the instantaneous power signature", Proc. IEEE International Conference on Industrial Technology (ICIT), 8-10 décembre 2004, Hammamet, Tunisie.
- E. Ternisien, G. Roussel, "Identification d'un modèle de dispersion et estimation des émissions de pollution dans un cadre multi-sources", Conférence Internationale Francophone d'Automatique (CIFA), 22-24 novembre 2004, Douz, Tunisie.
- G. Didier, E. Ternisien, O. Caspary, H. Razik, "Rotor cage fault detection in induction motor using global modulation index on the instantaneous power spectrum", Proc. 4th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), 24-26 août 2003, Atlanta, USA. (pdf)
- E. Ternisien, G. Roussel, M. Benjelloun, "Subspace method for blind characterization of atmospheric scattering model", IMACS 2000, 21-25 août 2000, Lausanne SUISSE. (pdf)
- E. Ternisien, G. Roussel, M. Benjelloun, "Critère de Localisation de Source et d'Identification pour un modèle de dispersion SIMO", Conférence Internationale Francophone d'Automatique (CIFA), 5-8 juillet 2000, Lille, France. (pdf)
- E. Ternisien, G. Roussel, M. Benjelloun, "Blind localization by subspace method for a scattering model", SYSID 2000 IFAC, 21-23 juin 2000, Santa Barbara, USA. (pdf)
- G. Roussel, E. Ternisien, S. Maouche, "Combinatorial optimizing algorithm using tree search A* and neural network estimation", CESA'96 IMACS Multiconference, Computational Engineering in System Applications, Juillet 1996, Lille, France.
Publications dans des conférences nationales avec actes et comité de lecture
E. Ternisien, G. Roussel, M. Benjelloun, "Identification aveugle du milieu de dispersion et localisation de source de pollution par observations multicapteur", Journées Automatique et environnement, CRAN, 9-10 mars 2000, Nancy, France. (pdf)